Time-of-Flight (ToF) cameras emerging technology to local positioning systems
Time-of-Flight (ToF) cameras, also known as depth cameras, use infrared light in order to determine the distance at which the illuminated targets are located. They are based on CMOS technology, and they are able to calculate the phase different between an emitted ray that is send from the camera, and the same one arriving at the lens.
If the device is set up and calibrated in a proper way, the relative position could be obtained with respect to the reference system of the lens. So as to illustrate it, a camera is set up horizontally on the floor, and a drone flies around the system. It will be located all the time as long as it is inside the camera field of view.
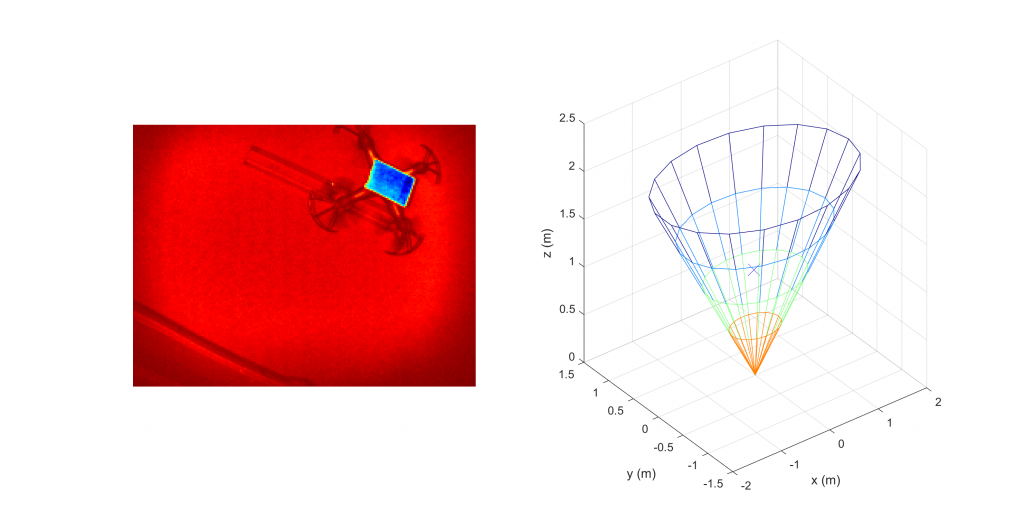
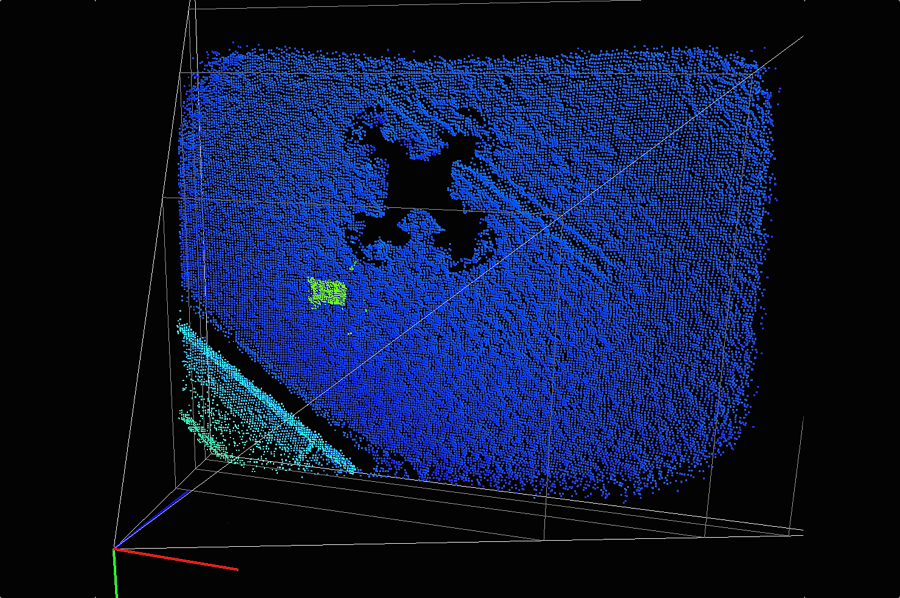
The results of the system appear in the figures. The first one depicts the 3D scene. It is appreciated only the drone marker, but it is clearly identified thanks to the shadow projected on the ceiling. The next figure offers more clarity: a gray scale image is shown on the left (with color range), and the localization is depicted on the right. In this case, the drone flied approximately around (x,y,z) = (1,1,0.5) m.
What conditions must be met to obtain the relative position of an object using a ToF camera? Regard Biomedis