El posicionamiento en exteriores gracias a los sistemas GNSS, como GPS o Galileo, es algo que utilizamos prácticamente a diario. Y no pensamos en lo complejo que resulta determinar la ubicación precisa de un determinado objeto… ¡en cualquier parte del mundo! Seguramente tengas en tu bolsillo un receptor GPS. Y habrá quien lo haya utilizado hoy para llegar a su destino. Sin embargo, estamos aún lejos de encontrar una respuesta similar para interiores, algo aceptado sin más como la mejor solución al problema.
El objetivo de mi trabajo de tesis es desarrollar un sistema de posicionamiento en interiores basado en luz visible, rápido y preciso, capaz de funcionar en un dispositivo móvil, y sin ayuda de servidores adicionales. Es decir, debe ser capaz de realizar todas las fases del posicionamiento por sí mismo utilizando los sensores que tenga a su disposición: cámara, brújula y acelerómetros como mínimo. Este trabajo se desarrolla dentro del Grupo de Investigación en Sistemas Sensoriales, está dirigido por Fernando Javier Álvarez Franco y Teodoro Aguilera Benítez, y cuenta con el apoyo del proyecto Limus.
Como seres humanos que somos hemos de acostumbrarnos a vivir con nuestros defectos. Una de las paradojas que más interesantes me resultan de esta condición es que haya faltas que podamos aprovechar. Nuestra visión, sin ir más lejos: gracias a su imperfección podemos disfrutar enormemente del cine, que no es más que la proyección de imágenes fijas que cambian con una frecuencia dada, 24 veces por segundo por lo general, aunque depende del medio.
En este trabajo de tesis intentamos aprovechar estos, en principio, defectos y lograr así un efecto. Y lo hacemos por partida doble.
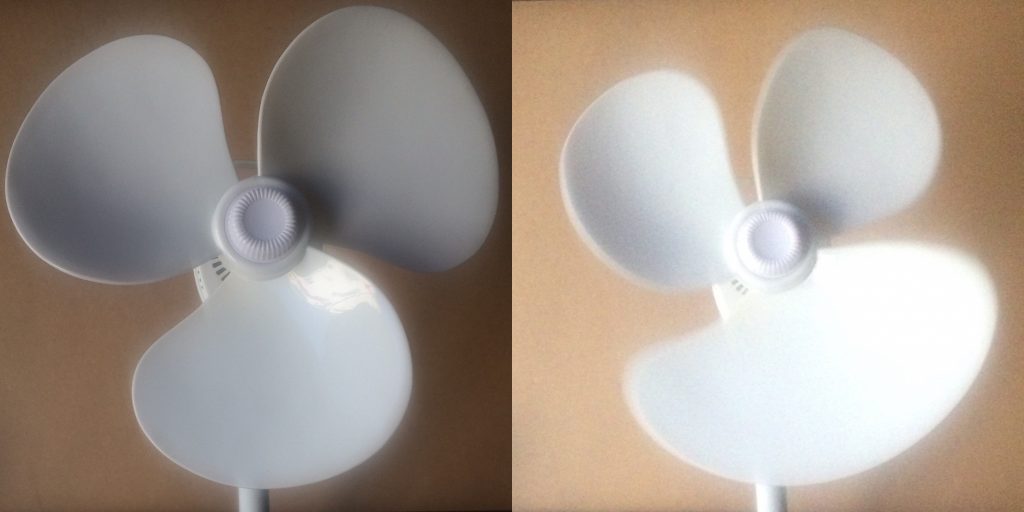
Primero, las cámaras incluidas en la práctica totalidad de los teléfonos móviles son, digamos, «defectuosas»: no capturan la imagen de golpe, lo hacen línea a línea. Existe un pequeño retardo entre la captura de una línea y la de la siguiente, de manera que un objeto que se mueva a alta velocidad como, por ejemplo, las aspas de un ventilador, se verá deformado.
Segundo, justo en este momento andamos inmersos en una revolución que está cambiando la forma en la que iluminamos nuestro entorno. Los LEDs están por todas partes, y es normal dado que presentan muchas ventajas con respecto a las tecnologías de iluminación que sustituyen. Lo que a nosotros nos importa es que, al contrario que con otros tipos de luminaria, resulta sencillo hacer parpadear un LED a una frecuencia por encima de la perceptible por nuestros imperfectos ojos.
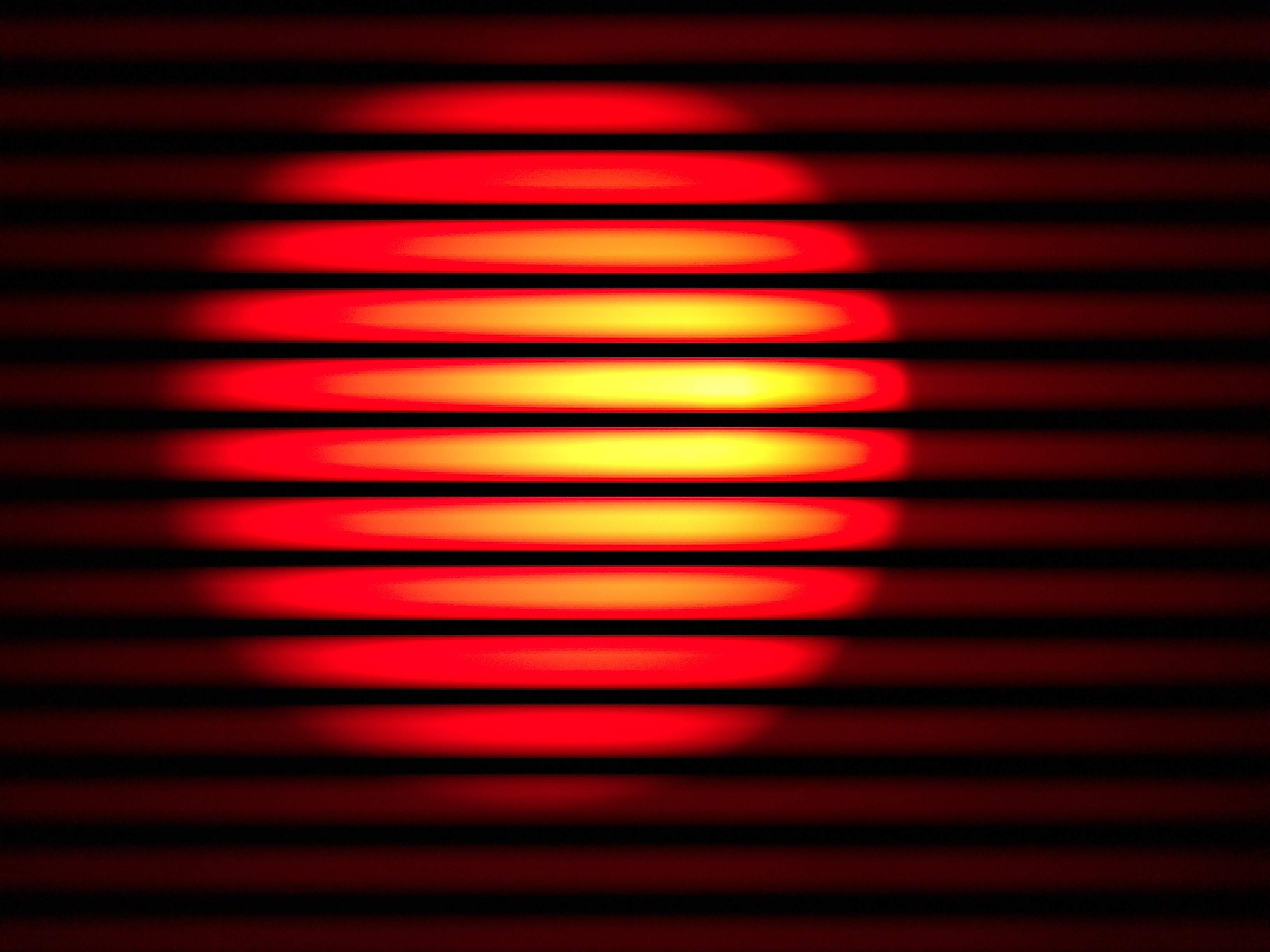
Y es combinando estos dos defectos como logramos algo muy interesante: utilizar la luz para codificar datos, haciéndola oscilar a altas frecuencias, sin que sea perceptible para el ojo humano; y decodificarla aprovechando el defecto de las cámaras de los teléfonos móviles.
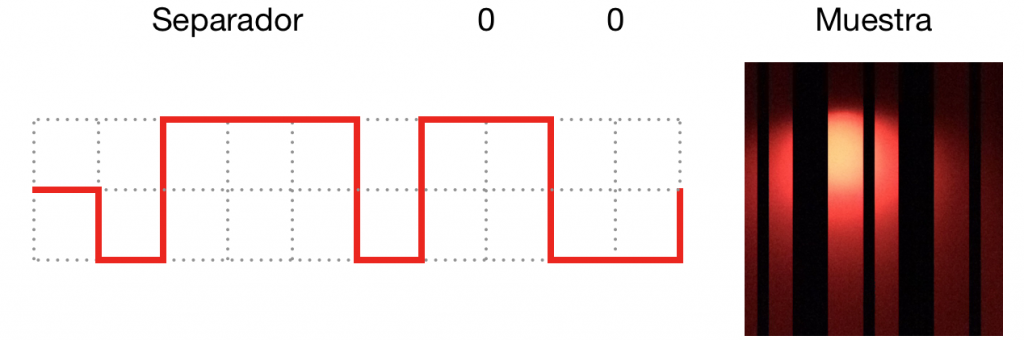
En la anterior figura se estaban transmitiendo valores a través del medio utilizando BMC, un tipo de codificación sencillo que tiene unas características que nos resultan muy útiles. Las imágenes de la derecha son el resultado de fotografiar un LED que parpadea a una frecuencia de 1 kHz. A la izquierda, el código emitido.
El pasado jueves 14 de marzo de 2019 tuvo lugar la presentación en sociedad del proyecto Limus, en el que nuestro grupo de investigación lleva trabajando varios años. En él utilizamos tecnologías de posicionamiento basadas en Bluetooth de baja energía (o BLE), ultrasonidos y luz visible.
En concreto, la baliza basada en luz visible utiliza un panel LED de unos 8 centímetros de diámetro adquirido en una gran superficie comercial. No requiere de una perfecta alineación entre emisor y receptor. Consigue unas tasas de acierto de detección del mensaje cercanas al 90% trabajando en distancias de entre 10 y 25 centímetros. Se puede ver en funcionamiento en el siguiente vídeo:
Así podemos realizar lo que se conoce como posicionamiento de celda: una baliza de este tipo colocada en el techo puede marcar una zona dentro de una sala. Cuando la cámara detecte una fuente de luz emitiendo un determinado código sabremos que estamos dentro de su zona de influencia y podremos llevar a cabo una acción como, por ejemplo, mostrar al usuario información relevante sobre la zona en cuestión.
Nuestro objetivo es ir más allá del posicionamiento de celda. Además, queremos que los emisores sean dispositivos IoT, con todas las ventajas que algo así puede implicar.
Si tienes cualquier pregunta al respecto no dudes en ponerte en contacto conmigo, estaré encantado de intentar resolverla.