Outdoors positioning is a common task thanks to GNSS systems, such as GPS or Galileo. And we do not even think about how complex it is to determine the precise location of an object … anywhere in the world! It’s almost sure you have a GPS receiver in your pocket. And maybe you have used it today to reach your destination. However, we are still far from finding a similar solution for indoors, something that is simply accepted as the best solution to the problem.
The objective of my PhD thesis is to develop an indoor positioning system based on visible light, fast and precise, capable of operating on a mobile device, and without the help of additional servers. That is, it must be able to perform all the phases of the positioning by itself using the available sensors: camera, compass and accelerometers at least. This work is carried out within the Sensory Systems Research Group, is directed by Fernando Javier Álvarez Franco and Teodoro Aguilera Benítez, and has the support of the Limus project.
As human beings we are to get used accustomed to living with our defects. One of the most interesting paradoxes that result from this condition is that there are deficiencies that we can take advantage of. Our vision, for example: thanks to its imperfections we can greatly enjoy the cinema, which is nothing more than the projection of fixed images that change with a given frequency, 24 times per second in general, although it depends on the medium.
In this PhD thesis we try to take advantage of these, in principle, defects and thus achieve an effect. And we do it twice.
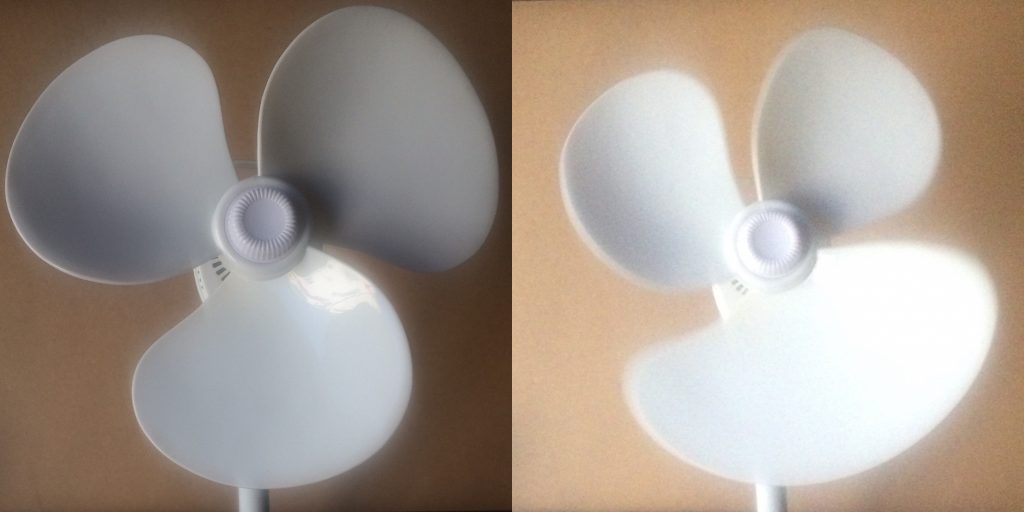
First, the cameras included in almost all mobile phones are, let’s say, “defective”: they do not capture the image at once, they do line by line. There is a small delay between the capture of one line and that of the next, so that an object that moves at high speed, such as the blades of a fan, will be deformed.
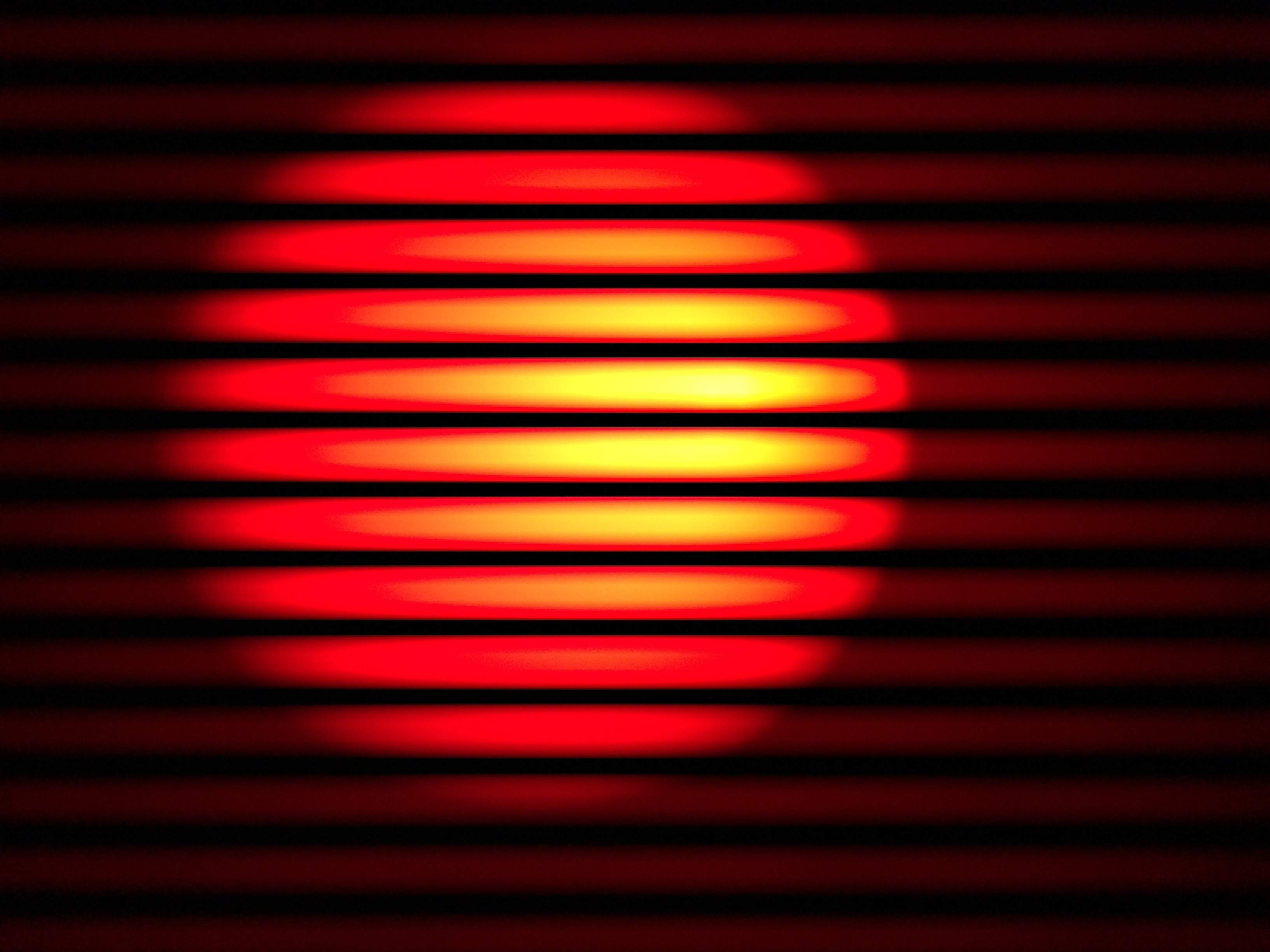
Second, right now we are immersed in a revolution that is changing the way we illuminate our environment. LEDs are everywhere, and by right given that they present many advantages over the lighting technologies they replace. What matters to us is that, unlike other types of luminaires, it is easy to flash an LED at a frequency above that perceptible by our imperfect eyes.
And it is by combining these two defects that we achieve something very interesting: using light to encode data, making it oscillate at high frequencies, without being perceptible to the human eye; and decoding it taking advantage of the defect of the cameras of mobile phones.
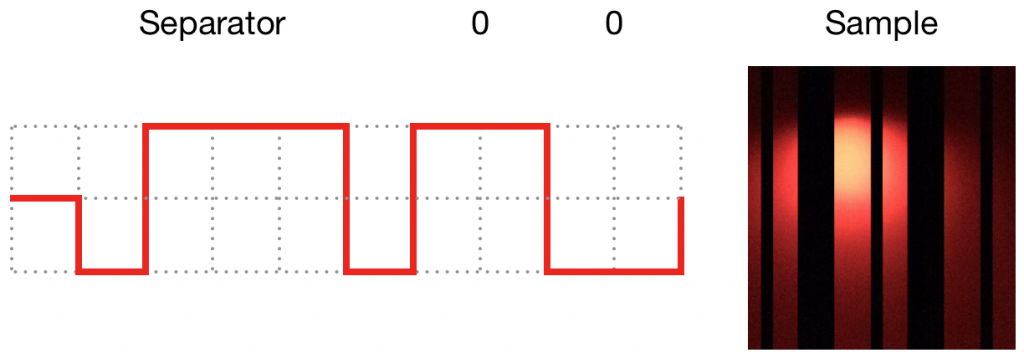
In the previous figure values were being transmitted through the medium using BMC, a type of simple encoding that has very useful characteristics for us. The images on the right are the result of photographing an LED that blinks at a frequency of 1 kHz. On the left, the sent code.
Last Thursday, March 14, 2019, the Limus project was presented into society, in which our research group has been working for several years. In it we use positioning technologies based on Bluetooth Low Energy (or BLE), ultrasounds, and visible light.
In particular, the beacon based on visible light uses a LED panel about 8 centimeters in diameter, acquired in a large commercial area. It does not require a perfect alignment between emitter and receiver. It gets message detection success rates close to 90%, working at distances between 10 and 25 centimeters. It can be seen in operation in the following video:
Thus we can perform what is known as cell positioning: a beacon of this type placed on the ceiling can mark an area within a room. When the camera detects a light source emitting a certain code, we will know that we are within its area of influence and we can carry out an action, such as showing the user relevant information about the area in question.
Our goal is to go beyond cell positioning. In addition, we want the beacons to be IoT devices, with all the advantages that something like this can have.
If you have any question about this, do not hesitate to contact me, I will be happy trying to answer it.