Indoor positioning systems have become a crucial tool when providing services based on the location of users. For this, the use of various technologies such as radiofrequency, infrared or ultrasound have become indispensable tools.
The availability of the different technological approaches appeared in recent years has enabled the estimations of position for an object and/or person with enough accuracy in indoor environments. This positioning information is key to provide Location-based Services (LBS) in a wide range of application fields, from industry or entertainment to elderly monitoring and healthcare.
Global Positioning System (GPS) provides an accurate and robust user location anywhere on Earth, whether there is a direct Line-of-Sight (LoS) with four or more GPS satellites. Nevertheless, GPS is not suitable to estimate indoor positions due to the attenuation and multipath effects produced by obstacles and walls on the GPS signals. To extend the user’s location to indoor environments, different sensory signals such as Radio-Frequency (RF) or InfraRed (IR), can be used by the beacons, which behave as indoor satellites, to compose the transmissions acquired by the receiver in order to carry out the estimation of its own position. These approaches achieve similar accuracies and performance to those provided by GPS (few meters). Likewise, ultrasonic technology has also contributed with interesting achievements and significant advantages, such as its relative low cost and its centimeter accuracy.
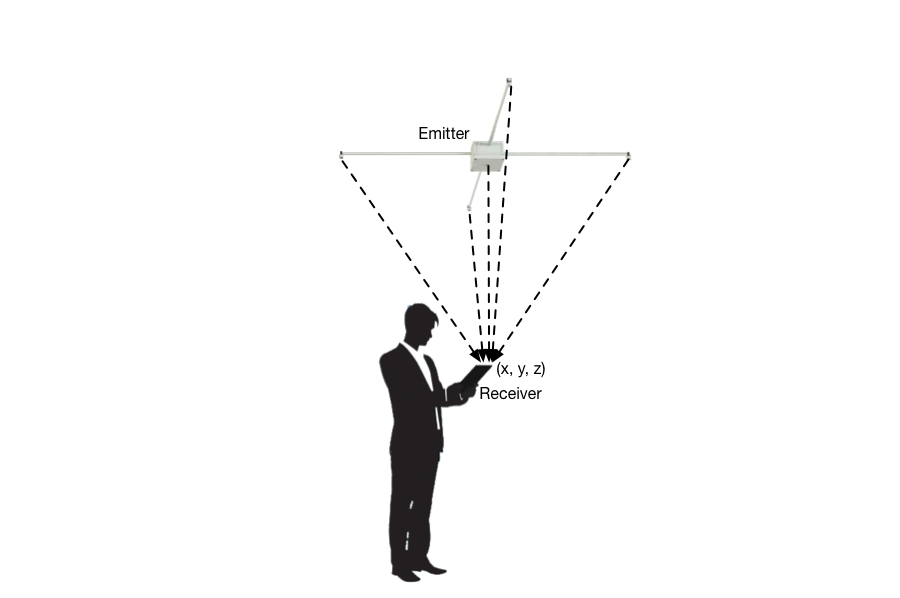
Generally speaking, an Ultrasonic Local Positioning System (ULPS) is composed of a set of at least three beacons strategically located to provide a suitable coverage throughout the positioning area. Furthermore, their transmissions are normally encoded and concurrent to avoid any synchronization link between beacons (emitters) and a possible receiver. The use of different types of sequences in the transmission encoding, such as pseudo-random codes or complementary sets of sequences, allows precise and robust times-of-flight (ToF) to be estimated, even under weak signal receptions or noisy environments, thanks to their suitable correlation properties.