Las cámaras de tiempo de vuelo (Time-of-Flight, ToF), una tecnología emergente para el posicionamiento en interiores
Las cámaras de tiempo de vuelo, también conocidas como cámaras de profundidad, utilizan luces infrarrojas para determinar la distancia a la que se encuentran los objetos iluminados. Basadas en tecnología CMOS, son capaces de calcular cuál es la diferencia de fase entre un rayo de luz que se envía desde la cámara y ese mismo rayo cuando llega de vuelta a la lente.
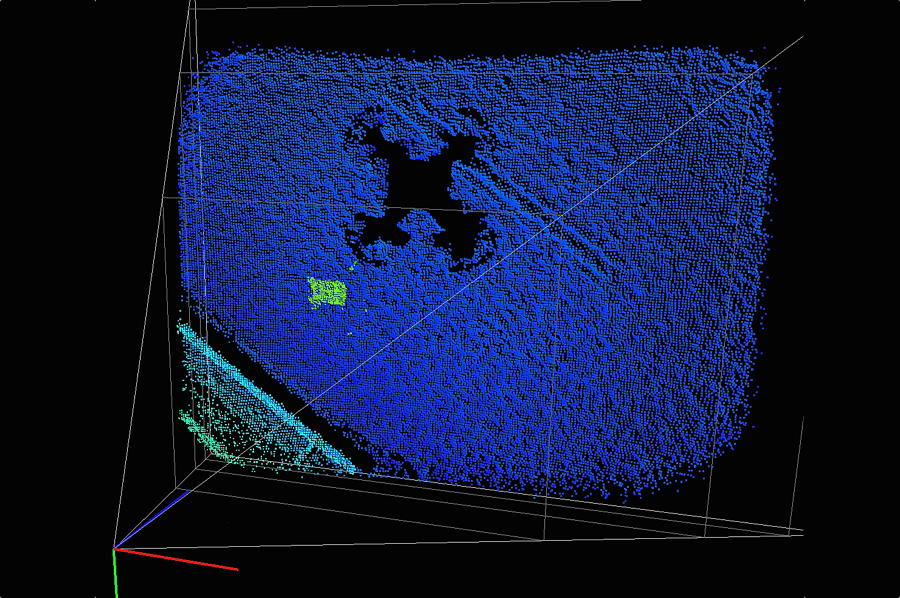
Si la cámara se configura y se calibra debidamente, podría obtenerse la posición relativa al sistema de referencia de la lente. Lo mejor es ilustrarlo. Para ello, se dispone la cámara en el suelo, de forma horizontal, y se hace volar un cuadricóptero. Siempre que el dron este dentro del campo de visión de la cámara, este quedará completamente localizado.
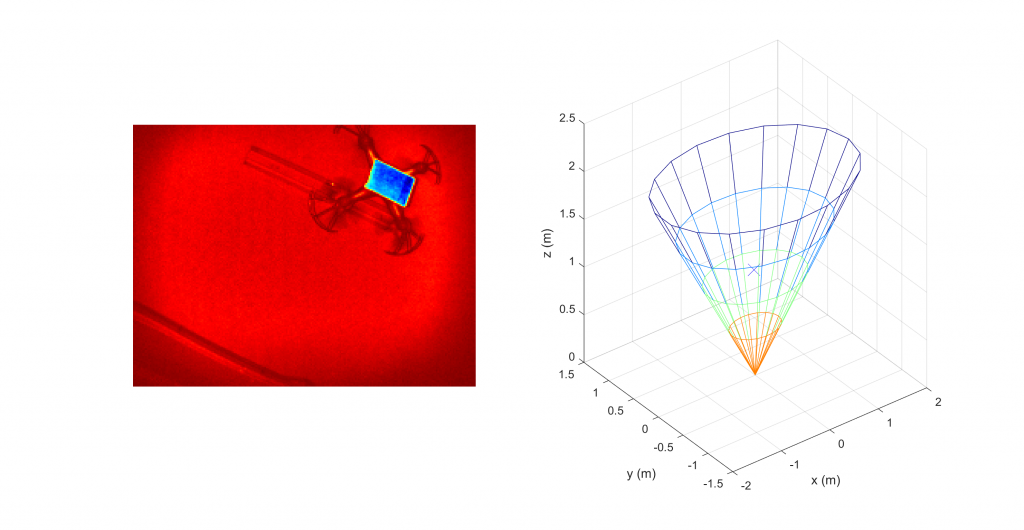
En las figuras aparece el resultado del sistema. La primera de ellas es una recreación de la situación en 3D. Sólo se aprecia el marcador del dron, pero se ve claramente que es él gracias a la sombra que se proyecta en el techo. Más claridad ofrece la siguiente figura: a la izquierda una imagen en escala de grises (pero en rango de colores), y a la derecha el resultado de la localización. Es este caso, el dron pasaba aproximadamente por el punto (x,y,z) = (1,1,0.5) m.