Los sistemas de posicionamiento en interior se han convertido en una herramienta crucial a la hora de prestar servicios basados en la localización de los usuarios. Para ello, la utilización diversas tecnologías como radiofrecuencia, infrarrojos o ultrasonidos se han convertido en herramientas indispensables.
La disponibilidad de los diferentes enfoques tecnológicos aparecidos recientemente ha permitido la estimación de la posición de objetos y personas en entornos de interior con suficiente precisión. Esta información de posicionamiento es clave para proveer servicios basados en localización (LBS, del inglés Location-Based Services) en un amplio rango de campos de aplicación, desde la industria o el entretenimiento hasta la monitorización de personas mayores o el ámbito de la salud.
El sistema de poscionamiento global (GPS, del inglés Global Positioning System) proporciona una precisa y robusta localización del usuarion en cualquier lugar del planeta siempre que exista una linea de visión directa (LoS, del inglés Line-of-Sight) con cuatro o más satélites GPS. Sin embargo, el GPS no es apropiado para estimar la posición en entornos de interior debido a la atenuación y el multicamino producido por paredes y obstáculos respectivamente. Para extender la localización del usuario a entornos de interior, se han propuesto la utilización de diversas señales sensoriales como Radio Frecuencia (RF) e Infrarrojo (IR) que pueden ser utilizadas como balizas, las cuales se comportan como satélites de interior, y componer las transmisiones adquiridas por el receptor para llevar a cabo una estimación de su propia posición. Este enfoque alcanza precisiones y rendimientos similares a los proporcionados por el GPS (algunos metros). De igual forma, la tecnología ultrasónica también ha contribuido con interesantes logros y significativos avances, como su relativo bajo coste y su precisión centimétrica.
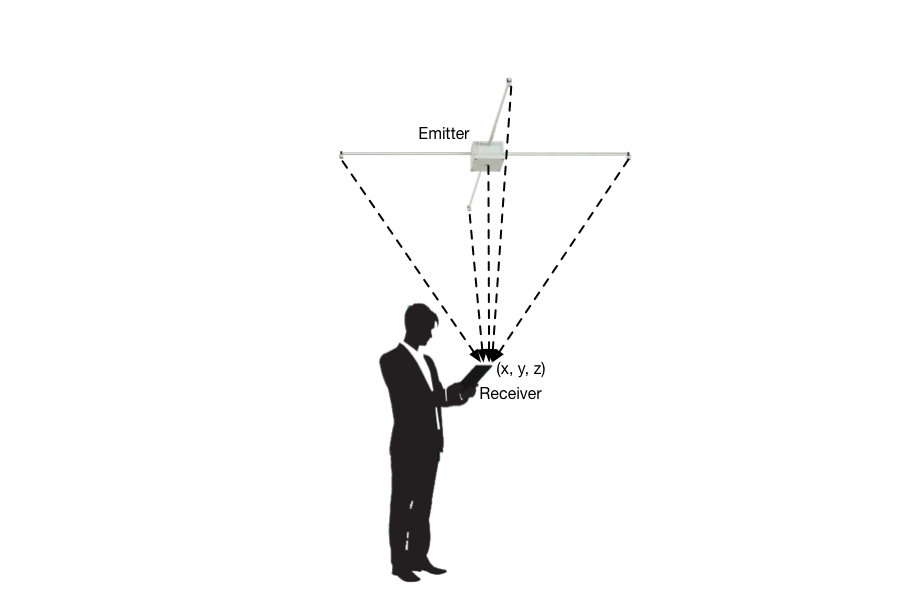
Generalmente hablando, un sistema de posicionamiento ultrasónico (ULPS, del inglés Ultrasonic Local Positioning System) está compuesto por por un conjunto de al menos 3 balizas estratégicamente localizadas para proporcionar suficiente cobertura en todo el área de posicionamiento. Además, sus transmisiones son normalmente codificadas y simultáneas para evitar cualquier tipo de sincronización entre emisor y receptor. El uso de diferentes tipos de secuencias en las transmisiones codificadas, como las secuencias pseudoaleatorias o los conjuntos de secuencias complementarias, permiten la obtención de tiempos de vuelo (ToF, del inglés Time of Flight) precisos y robustos, que pueden ser estimados incluso bajo recepciones débiles de la señal o en ambientes ruidosos, gracias a sus adecuadas propiedades de correlación.